Researchers at the Korea Advanced Institute of Science and Technology (KAIST) laboratory have developed a fast-running biped robot ‘Raptor’ inspired by the ferocious velociraptor, a predatory dinosaur that lived 75 million years ago. The robot biped can register a top speed of 46 kmph (28.6mph) on a treadmill, and even though it’s still in developmental stages, with this speed it can easily outrun the Olympic champion and the fastest human known Usain Bolt, whose estimated top speed is 43.92 kmph.
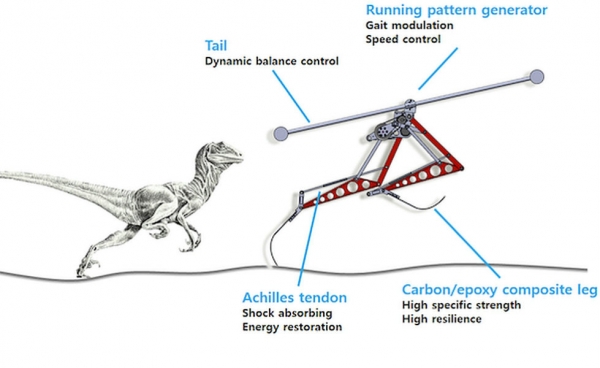
Jongwon Park, a PhD student at KAIST’s Mechatronics, Systems and Control Laboratory who led the project, stated that the robot was built with two agile legs developed from lightweight composite material and a tail (or a spinning rod), that stabilizes the robot’s body as it navigates. Apart from this, the robot is able to dodge maneuver around hurdles with its tail, without stumbling. The robot, developed by Park and his colleagues Jinyi Lee, Jinwoo Lee, Kyung-Soo Kim, and Professor Soohyun Kim of KAIST, weighs just three kilograms. It employs just one motor per leg for locomotion, and has extremely simple controls. It functions on a program called a running pattern generator that controls speed and gait.
The Cheetah robot, developed by MIT’s Boston dynamics still holds the record for the fastest robot, with Cheetah registering a top speed of 47 kmph. While even the Cheetah uses its tail for stabilization, Raptor is the first to use its tail to dodge obstacles. Both Cheetah and Raptor can currently run only over treadmills, but Boston Dynamics is working on the WildCat, an enhanced version of the Cheetah that shall even run outdoors come 2015.
At present the KAIST team is working towards bettering and fine-tuning Raptor. Watch the below video to know more about the biped-
Researchers at the Korea Advanced Institute of Science and Technology (KAIST) laboratory have developed a fast-running biped robot ‘Raptor’ inspired by the ferocious velociraptor, a predatory dinosaur that lived 75 million years ago. The robot biped can register a top speed of 46 kmph (28.6mph) on a treadmill, and even though it’s still in developmental stages, with this speed it can easily outrun the Olympic champion and the fastest human known Usain Bolt, whose estimated top speed is 43.92 kmph.
Jongwon Park, a PhD student at KAIST’s Mechatronics, Systems and Control Laboratory who led the project, stated that the robot was built with two agile legs developed from lightweight composite material and a tail (or a spinning rod), that stabilizes the robot’s body as it navigates. Apart from this, the robot is able to dodge maneuver around hurdles with its tail, without stumbling. The robot, developed by Park and his colleagues Jinyi Lee, Jinwoo Lee, Kyung-Soo Kim, and Professor Soohyun Kim of KAIST, weighs just three kilograms. It employs just one motor per leg for locomotion, and has extremely simple controls. It functions on a program called a running pattern generator that controls speed and gait.
The Cheetah robot, developed by MIT’s Boston dynamics still holds the record for the fastest robot, with Cheetah registering a top speed of 47 kmph. While even the Cheetah uses its tail for stabilization, Raptor is the first to use its tail to dodge obstacles. Both Cheetah and Raptor can currently run only over treadmills, but Boston Dynamics is working on the WildCat, an enhanced version of the Cheetah that shall even run outdoors come 2015.
At present the KAIST team is working towards bettering and fine-tuning Raptor. Watch the below video to know more about the biped-